you can listen to radio chatter and real live stream from iss here (tested last 2018.08.02): http://www.ustream.tv/channel/9408562
not HD quality but well… at least it works and is really live.
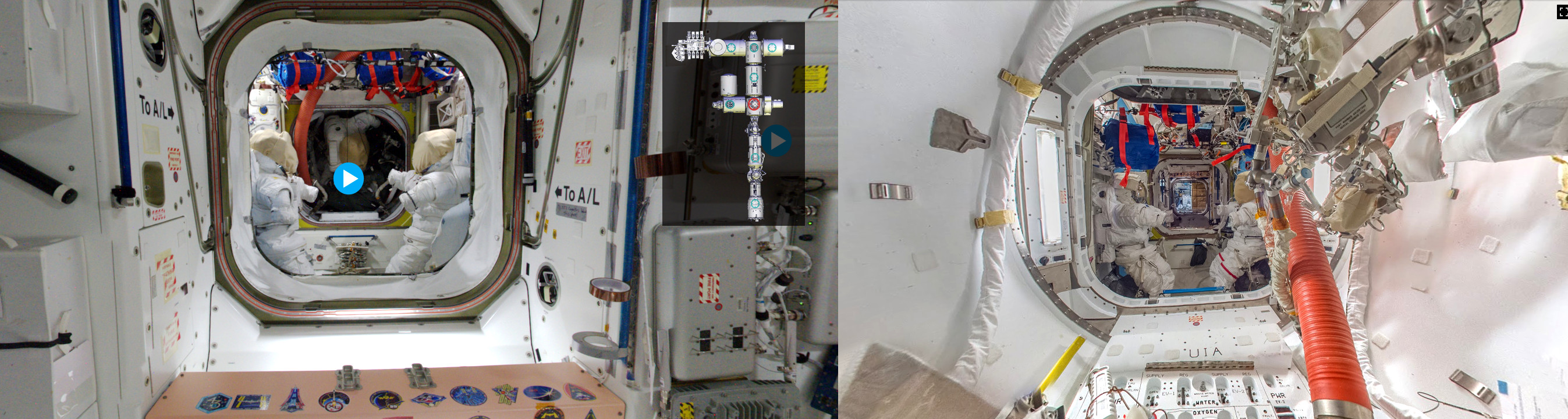
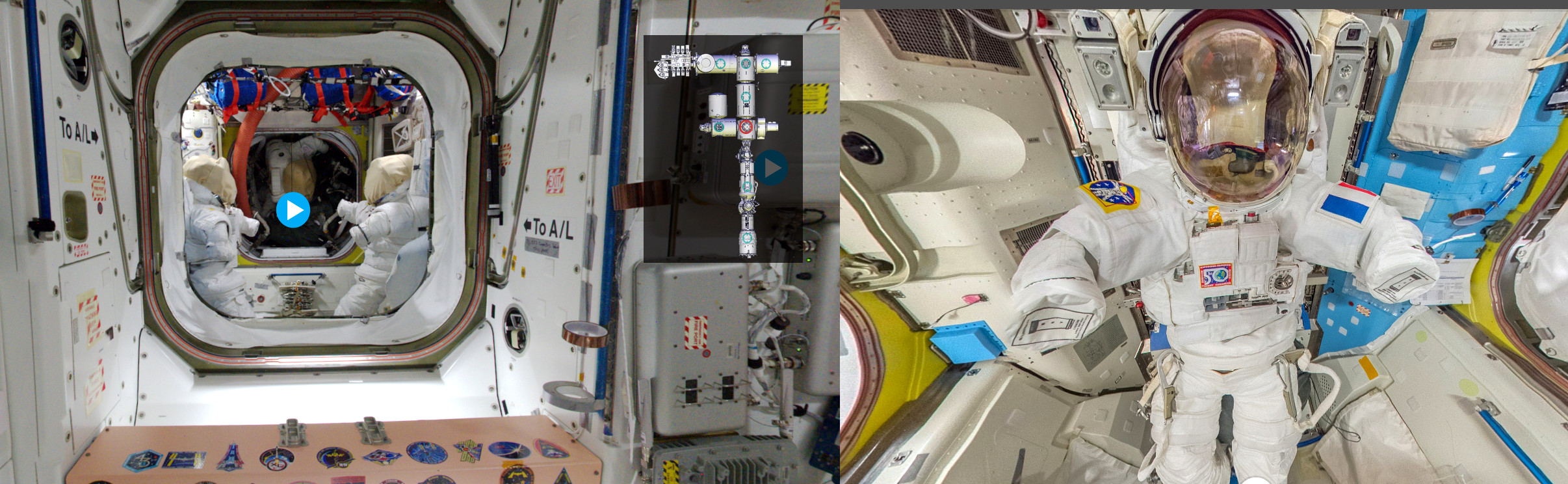
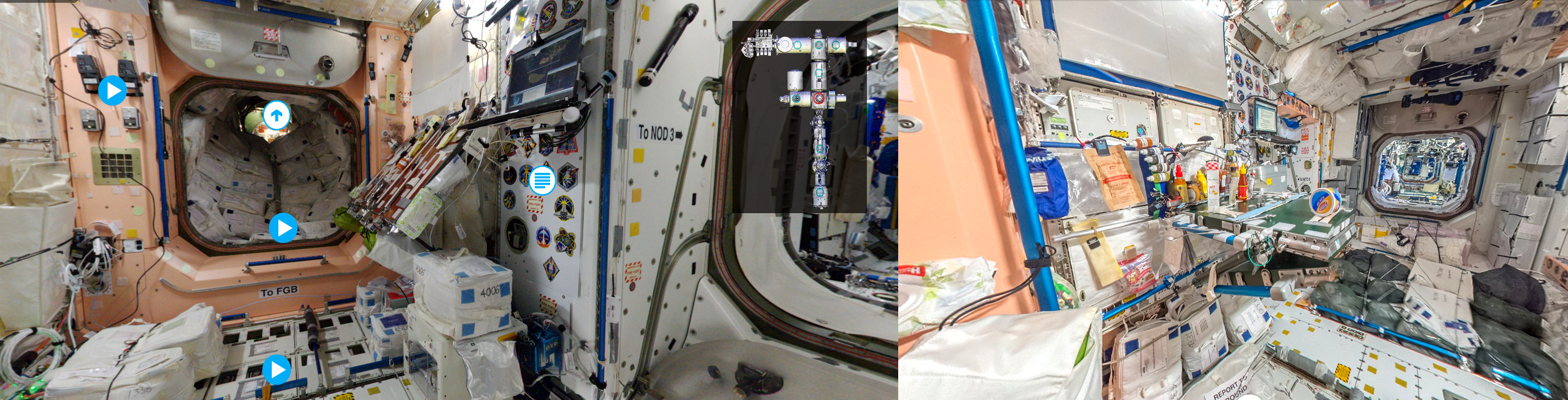
some nice pictures from the 360 tours:
US Google Version: https://www.google.com/streetview/#international-space-station
European ESA: https://esamultimedia.esa.int/multimedia/virtual-tour-iss/
done with open source: https://ggnome.com/pano2vr
and also here: https://www.youvisit.com/tour/jamado/new_experience_7
mabye stream this video at the same time so you have explanations 🙂
live stream camera and radio chatter from iss: http://www.ustream.tv/channel/live-iss-stream

The Cupula – with Samantha_Cristoforetti (Italy, Milano).

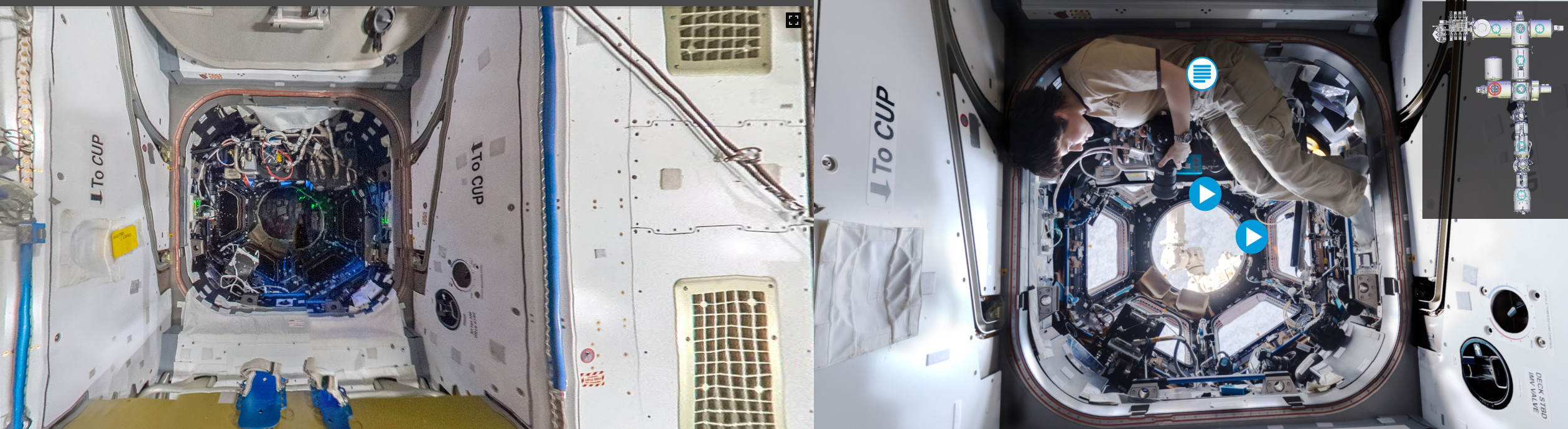
node1: where you eat but also get to space walk
this is where the Friday night party dinner goes wild: at the launch table: also this room is STUFFED with food supplies.
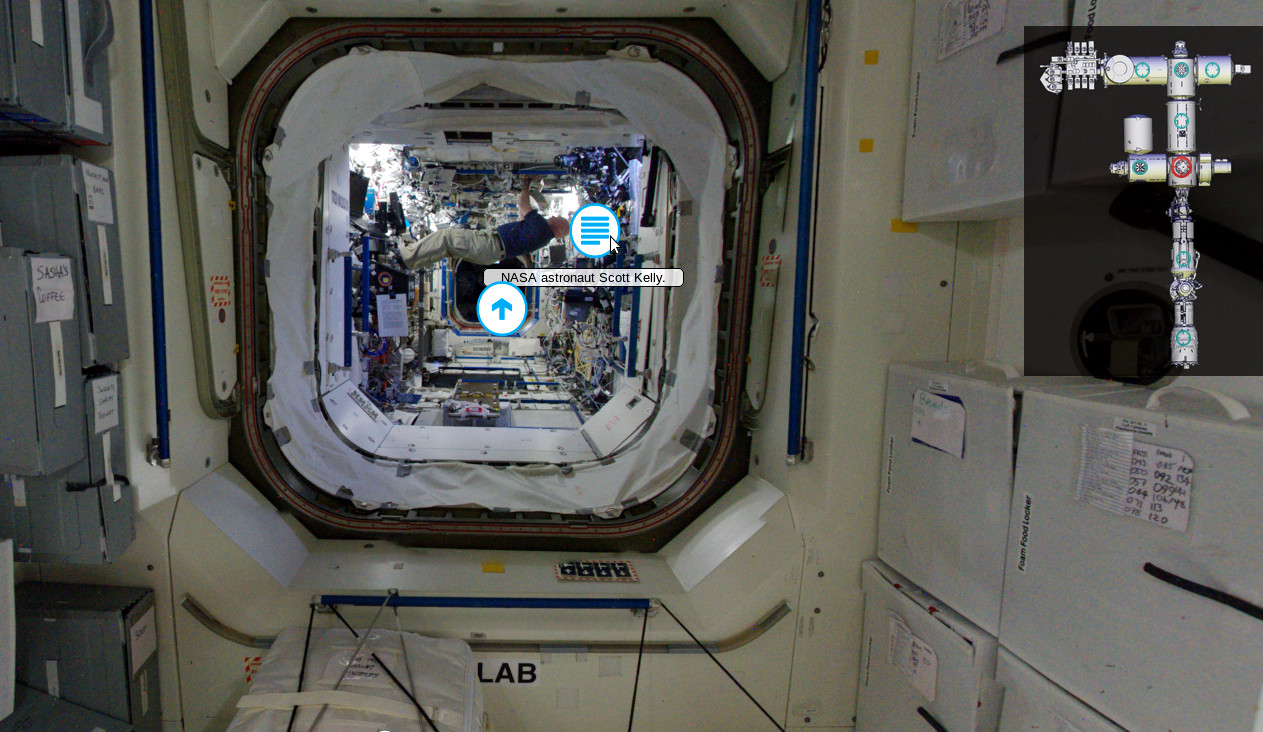
Scott Kelly: we found ya

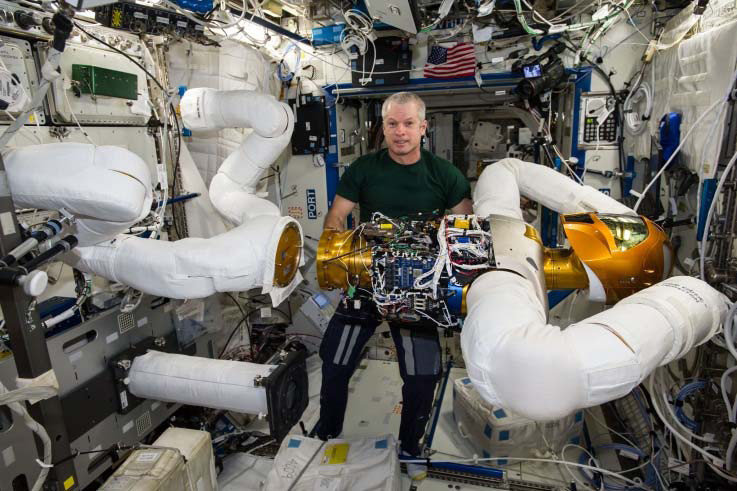
WHAT IS THIS ROBOT EXPERIMENT ALL ABOUT?
… DEEP SPACE MISSIONS! Exploring asteroids, comets and mars or mars moons!


https://en.wikipedia.org/wiki/Robonaut
Robonaut 2: R2
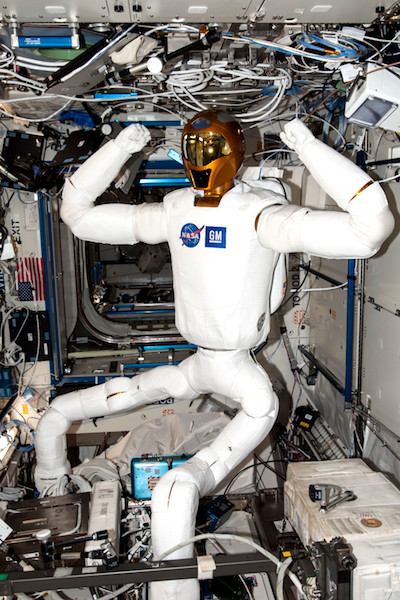
The Robonaut project has been conducting research in robotics technology on board the International Space Station (ISS) since 2012 (more on R2 in the ISS).
Recently, the original upper body humanoid robot was upgraded by the addition of two climbing manipulators (“legs”), more capable processors, and new sensors.
While Robonaut 2 (R2) has been working through checkout exercises on orbit following the upgrade, technology development on the ground has continued to advance.
Through the Active Reduced Gravity Offload System (ARGOS), the Robonaut team has been able to develop technologies that will enable full operation of the robotic testbed on orbit using similar robots located at the Johnson Space Center.
Once these technologies have been vetted in this way, they will be implemented and tested on the R2 unit on board the ISS.
The goal of this work is to create a fully-featured robotics research platform on board the ISS to increase the technology readiness level of technologies that will aid in future exploration missions.
One advantage of a humanoid design is that Robonaut can take over simple, repetitive, or especially dangerous tasks on places such as the International Space Station.
Because R2 is approaching human dexterity, tasks such as changing out an air filter can be performed without modifications to the existing design.
Another way this might be beneficial is during a robotic precursor mission.
R2 would bring one set of tools for the precursor mission, such as setup and geologic investigation.
Not only does this improve efficiency in the types of tools, but also removes the need for specialized robotic connectors.
Future missions could then supply a new set of tools and use the existing tools already on location. (src)
never go to space without SALOTAPE!
also interesting: most laptops on board are from lenovo besides some ipads.

tweets and news:
iss roadmap calendar: http://spaceflight101.com/iss/iss-calendar/
liked this article?
- only together we can create a truly free world
- plz support dwaves to keep it up & running!
- (yes the info on the internet is (mostly) free but beer is still not free (still have to work on that))
- really really hate advertisement
- contribute: whenever a solution was found, blog about it for others to find!
- talk about, recommend & link to this blog and articles
- thanks to all who contribute!